



Tomcat Evo Elektro
Da ich im August mit meinem meinem Lieblingsallzwecksegelflieger (Wanderer) ein kleines Duell gegen eine Baudis GP 15 in der Luft hatte, das ich verlor, musste nun dringend Ersatz dafür her. Die Anforderungen waren: baldige Verfügbarkeit, etwa 2,5-2,8m Spannweite, breites Anwendungsspektrum, gute Transportabilität.
Der Gebrauchtmarkt hielt leider nichts für mich parat, deshalb musste ich nach Seglern von der Stange suchen. Dank seiner kompakten Grösse, seines geräumigen Rumpf und des Kreuzleitwerks kam ich schnell auf den Tomcat von RCRCM/Sansibear. Davon gibt es einen leider weniger hübschen, aber fliegerisch überlegenen Nachfolger, den Tomcat Evo. Ebendiesen habe ich beim Modellmarkt24 in einfacher CFK-Ausführung bestellt. Er dürfte wohl eher ein bisschen schneller und weniger floatig sein als mein Wanderer, dessen Ersatz er wird, aber einen deckungsgleichen Ersatz habe ich nicht gefunden. Aus irgend einem Grund hatte ich den Wanderer ja auch entwickelt 😀
{kind=link}
Bald darauf stand die Kiste mit Rumpf, Flügeln Leitwerk und Verbinder sowie diversen Kleinteilen vor meiner Tür, und nach der Lackierung meines Hunters gings flugs an des Tomcats Montage. Die Teile waren insgesamt von guter Qulität, der Verbinder geht mit leichter Kraftanwendung in die Aufnahme, was einen guten Sitz verspricht. Die Flügelbolzen sind fertig montiert und die Löcher passend im Rumpf. Diese mühsame Arbeit ist bereits erledigt. Bei den Flügeln und Leitwerken sind die Nähte speziell am Randbogen etwas ausgefranst, da muss man noch etwas nachschleifen. Bei mir zeichnet sich auf der Flügelunterseite der Holmgurt mit einer leichten Kante stellenweise etwas ab – unschön, aber nicht schlimm. Die Ruderspalten klemmen teilweise, mit einem Schleifpapier ist das aber schnell beseitigt. Das Schleifpapier muss noch etwas hinhalten, um die Dichtlippen örtlich zu verdünnen, um volle Ausschläge zu erhalten – sonst klemmts beim Rückstellen.
Die Rumpfform der Elektroversion ist extrem hässlich. Das kam auf den Bildern des Shops gar nicht so rüber. Sieht aus wie eine flachgedrückte Banane. Ich hoffe, ich gewöhne mich noch daran. Aber immerhin ist so für Platz darin gesorgt.
Für die Ausrüstung habe ich gleich wie vom Shop empfohlen mitbestellt: Vier Servos KST DS125 MG für die Flügel (die perfekt saugend in die Servorahmen vom RCRCM-Zubehörsatz passen!), zwei DS213MG für den Rumpf. Die Motorvorschläge von Modellmarkt24 machen durchaus Sinn, aus Verfügbarkeitsgründen habe ich mich aber für einen Peggy Pepper 2221-10 Mit Reisenauer 5:1 Getriebe bestellt (ansonsten wäre es ein Kontronik Kira 480 geworden…). Es ist unglaublich, dass das Teil mit 3-5s und fast endlosen Propellervarianten funktioniert. Ich habe mich für 4s und 15×8 Propeller entschieden. Die Kapazität wählte ich dann am Schluss aus, was für den Schwerpunkt nötig ist. In Frage kam ein vorhandender Swaytronic 4s2400 oder 4s3000 Akku. Dazu ein Multiplex Roxxy 630-6 Regler, der 60A abkann. Ich greife etwas voraus, ein schwererer Motor wäre besser gewesen und der Regler sollte keinen Milimeter dicker sein.
Der Rumpf hat ein Pendelruder-Hebel eingebaut, deswegen ging ich davon aus, dass das Höhenleitwerk als Pendel ausgeführt ist. Denkste. Es ist gedämpft, aber das Ruder wird wie ein Pendel angelenkt. Gewöhnungsbedürftig. Dafür sind 2 Kohlestäbchen und zwei Metalldrähte zur Montage notwendig. 4 Teile, die man verlieren oder zuhause vergessen kann 🙁
Der Zugang zum Pendelhebel ist noch auszutrennen, und um eine Abdeckung muss man sich selber kümmern. Im Gegensatz zur Öffnung zu den Rumpfservos, dort ist alles schon fertig ausgetrennt und ein Deckel aus GFK liegt bei. Die Bowdenzugröhrchen für HR und SR sind bereits in den Rumpf geklebt. Als Besitzer eines Schneideplotters und diverser Folien dazu konnte ich den Deckel später mit schwarzer Folie aufkleben, so dass man den fast nicht mehr sieht.

Das etwas zu lange Servobrett

Die tiefgelegten Bowdenzüge
Leider bin ich nicht ganz drausgekommen, wie die Anlenkung von Seite und Höhe gedacht war. Es liegt ein Servobrett bei, der Zugriff zu den Servos geschieht von oben durch eine Öffnung über dem Flügel. Das Servobrett würde dorthin passen. Aber die gut eingeklebten Bowdenzüge führen unter dem Brettchen durch, wo ein Anschluss an die Servos unmöglich ist. Deshalb habe ich die Röhrchen soweit es geht rausgerissen und ein neues für das Seitenruder eingeklebt. Das Pendel lenke ich direkt mit einem 5mm Kohlerohr an, an dessen Enden ich M3 Gewindestangen eingeklebt habe, die ich mit Gabelköpfen versehen habe. Die Ausschnitte für die Servos im Brett sind zu weit auseinander, so dass ich das Brett in der Mitte einfach gekürzt und neu zusammengeklebt habe. So komme ich nun problemlos an beide Servos ran. Grund für das grosse spacing dürfte wohl der Anschluss der Flügelservos sein, der auch in dieser Gegend liegt. Ja, es ist etwas eng da drin. Den Motorspant habe ich passend zum Motor selbst aus 2mm GFK gefräst. Es lag zwar einer im Zubehörbeutel, aber ohne passende Löcher.
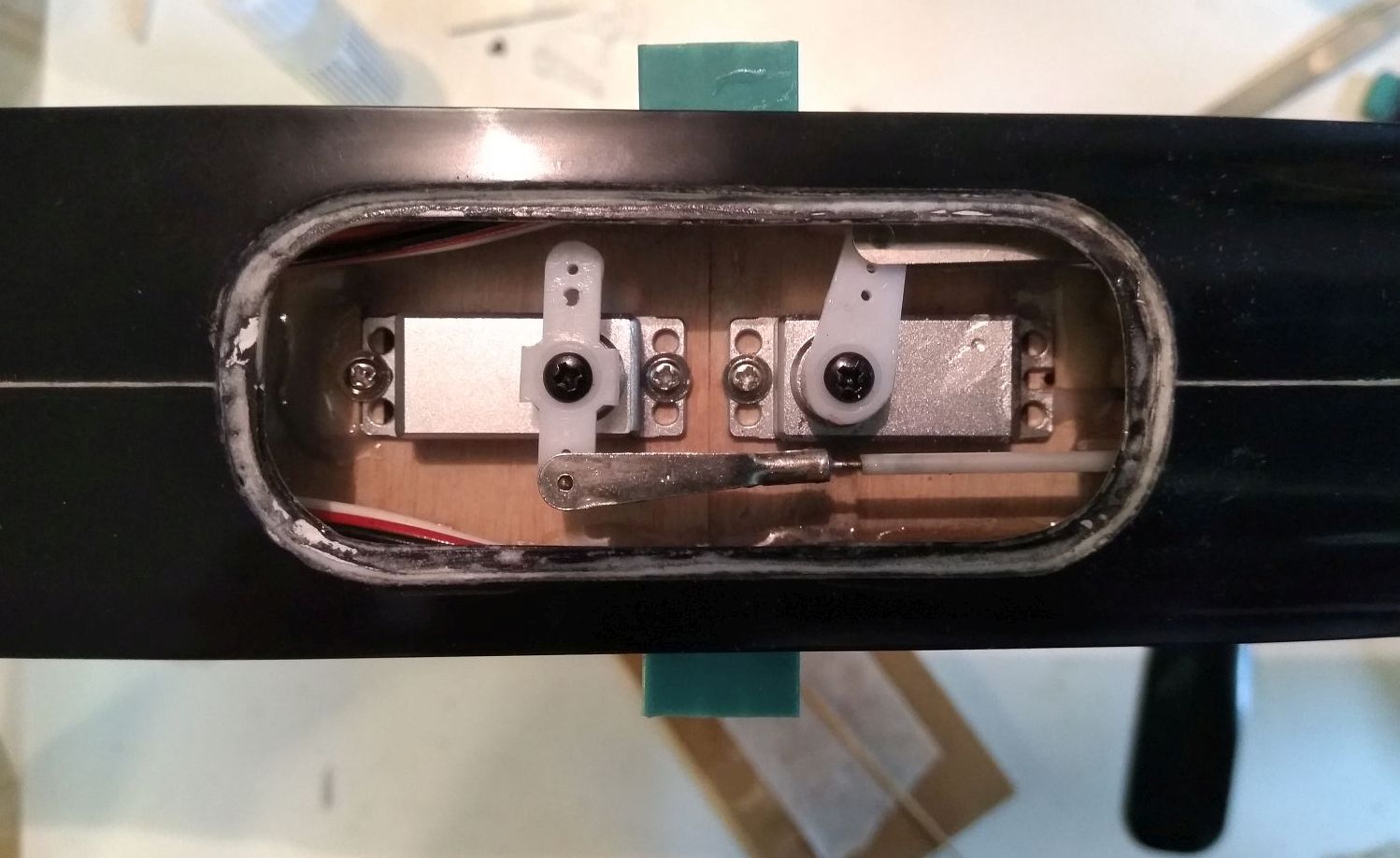
Das fertig montierte Servobrett. Man beachte die seitlich abgeführten Kabel

Seitenruderanlenkung
Die Anlenkungen der Querruder und Wölbklappen sind klassisch überkreuz ausgeführt. Dafür habe ich die beiliegenden Servorahmen und Ruderhebel verwendet. Mit dem Dremel musste ich nur noch ein paar Schlitze in die Ruder machen, sowie in den Rudersteg flächenseitig. Die Ruderhebel können mit einem Drahtstift durch die Ösen perfekt gleichmässig positioniert und eingeklebt werden. Diesen Trick habe ich mir hier abgeschaut. Die Hebel am Servo können auf diese Weise so kurz gehalten werden, dass die beiliegenden bauchigen Servodeckel weggelassen werden können. Ich habe mir einfach flache Deckel aus fester Plastikfolie aus dem Abfall geschnitten. Weggelassen habe ich auch die Rudergabeln aus dem Kleinteilesatz, sie dünken mich zu breit und können sich auf den Hebeln seitlich bewegen. Hier kamen die Gabeln aus dem Modellbauladen um die Ecke zum Einsatz. Die elektrische Verbindung zum Rumpf mache ich wie immer mit 5-Poligen MPX-Stecker. Rumpfseitig muss man platzsparend löten, um die Kabel direkt nach hinten führen zu können. Sonst sind sie den Servohebeln im Weg. Weil man mit Schrumpfschlauch nicht so schön ‚ums Eck‘ löten kann, wurde der Anschluss mit PlastiDip isoliert.

Querruderservo montiert
Weiter gings mit dem Rumpf. Mit dem Peggy Pepper ist der Schwerpunkt auch mit dem Swaytronic 4s3000mAh Akku noch zu weit hinten. Also schiebe ich den Akku ganz nach vorne, wo ich ihm mit einem kleinen GFK-Plättchen gegen Motorberührung schütze. Gegen Verrutschen nach oben und hinten sichere ich ihn mit einem Bodenplättchen und Klettband. Hinten ist genug Platz für Empfänger und Regler. Die Antennen gehen sowohl dem Rumpfboden entlang nach vorne, sowie hinter der Kabinenhaube aus dem Rumpf heraus. Da ist viel Kohle drin. Der vom Modellmarkt24 empfohlene und mitbestellte 38mm Freudenthaler-Spinner ist leider zu klein. 40mm passt haargenau. Somit habe ich den kleinen Spinner zurückgeschickt und begnüge mich bis zum Erhalt des grösseren auf einen etwas massiveren Ersatz aus meinem Fundus. Mit 15g Blei Eisen vorne im Rumpf liegt der Schwerpunkt bei den empfohlenen 95mm. Das Abfluggewicht beträgt 2330g.
Ich hätte gerne gesehen, dass der Flugi etwas leichter geworden wäre, leider benötigt das Ding viel Gewicht im Bug. Ein schwererer und/oder kürzerer Motor (= mehr Gewicht ganz vorne im Rumpf) hätte hier vielleicht etwas geholfen, einen kleineren Akku zu verwenden. Mit dem Wissen, dass der Kreisdurchmesser am Spinner nicht 38mm, sondern 40mm ist, hätte man vielleicht auch einen Axi Cyclone einbauen können. Ein gekapselter Aussenläufer, der durch seine Bauweise nicht besonders leicht ist, aber dessen Stromanschlüsse auf der Rückseite sind, also keine Kabel, die neben dem Motor durchmüssen wie bei klassischen Aussenläufern.


Rumpf mit und ohne Akku – Die Kabel am Regler dürfen keinen mm mehr kürzer sein…

Ein Bild des fertigen Tomcat Evo im düsteren Keller. Auf das ich bald ein schöneres auf dem Flugplatz machen kann!
Nun warte ich auf Erstflugwetter*! Bin gespannt, wie das Teil fliegt.
*) Erstflugwetter: Temperatur, wo nicht die Finger abfrieren, wo man auf den Flugplatz kommt, ohne seinen alten Bus einzusalzen, und einigermassen Windstille herscht. Also noch nicht so bald.